Atlas
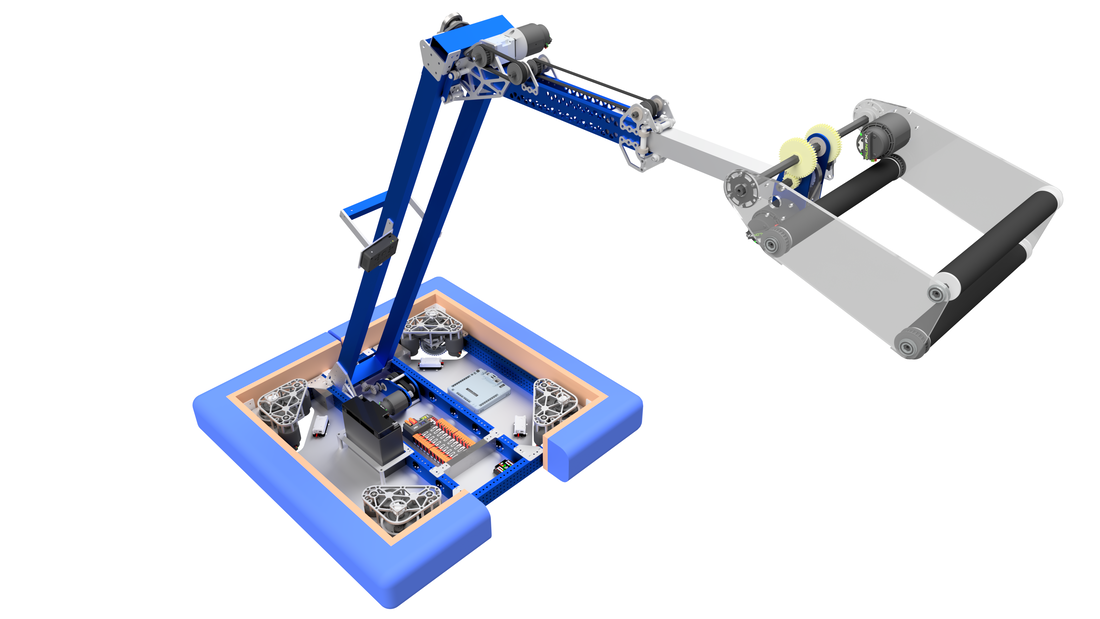
Team 2637 is excited to showcase its newest and most advanced robot yet, Atlas!
Drivebase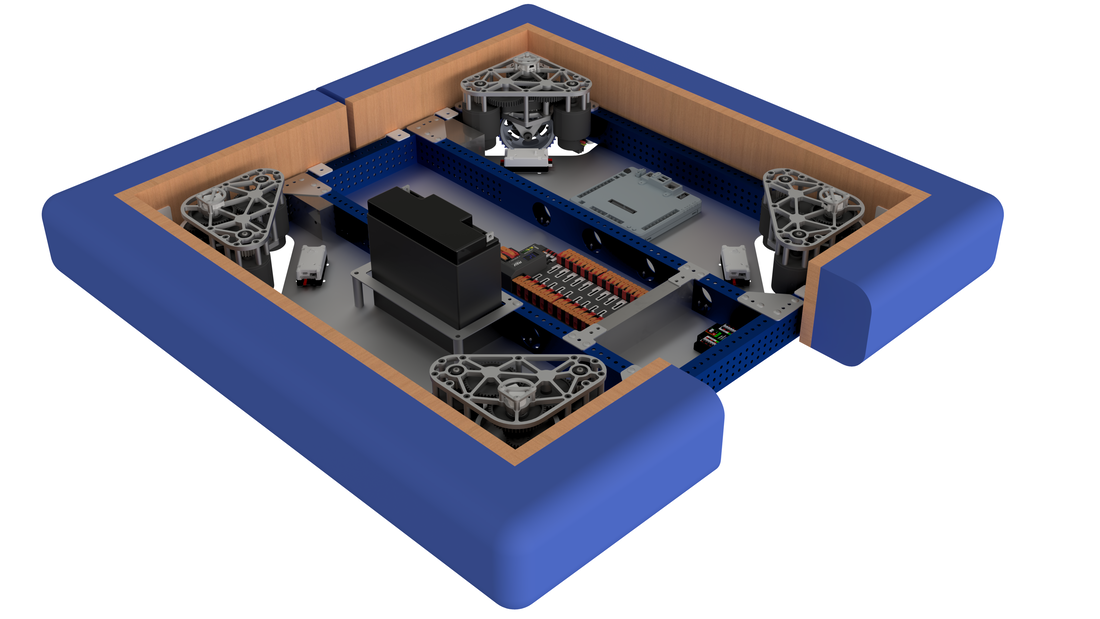
|
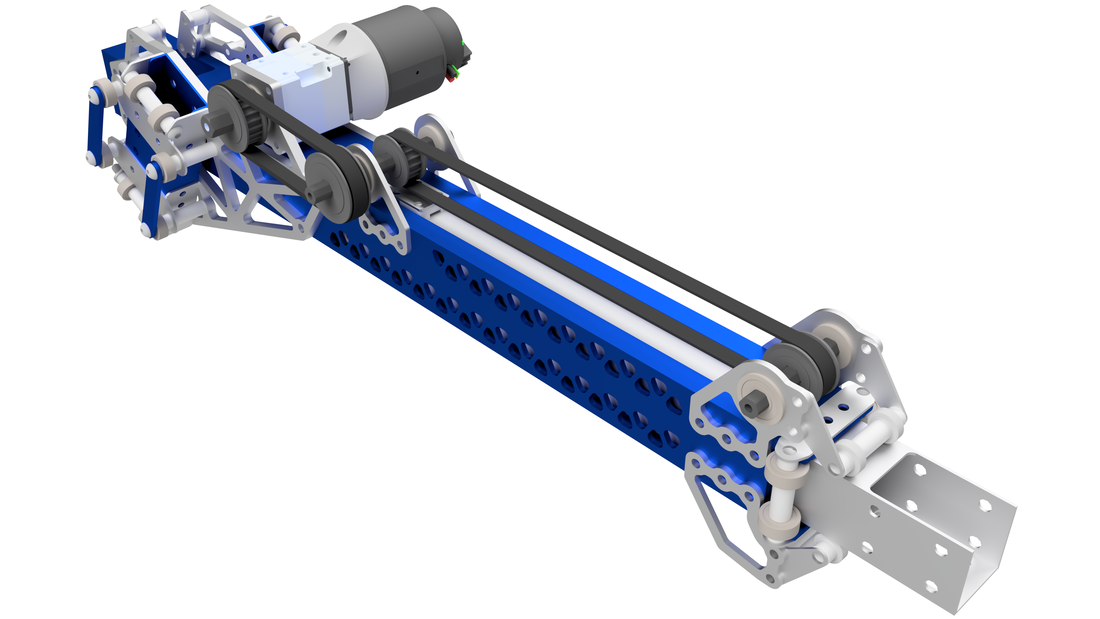
Elevator
|
Arm |
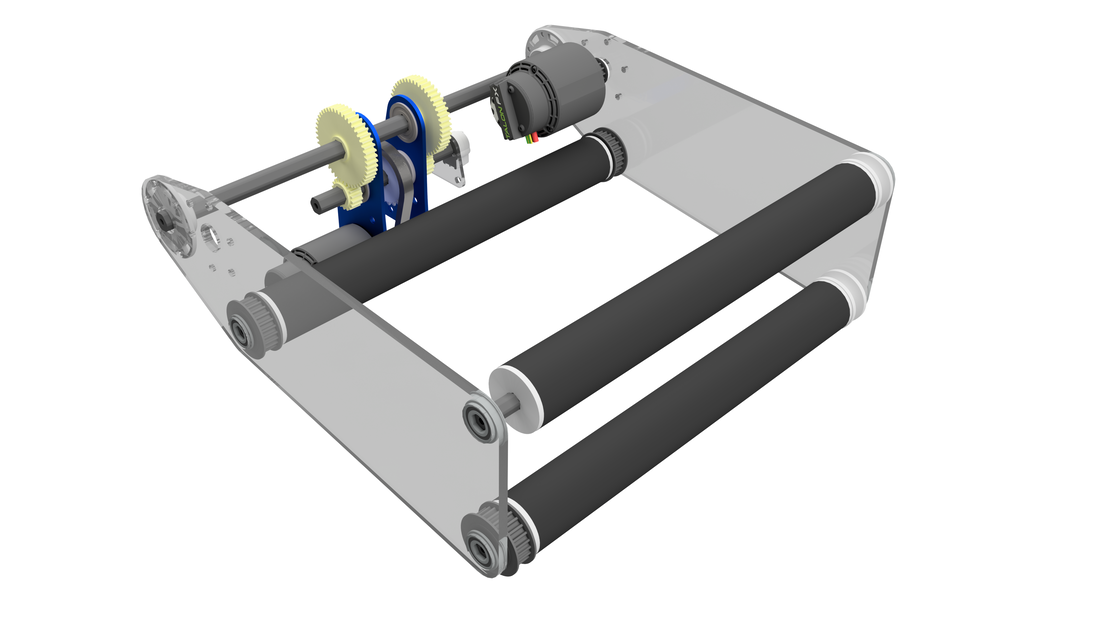
Intake |
|
|
Drivebase
|
Elevator
|
Arm |
Intake |
|
|
|
Email us at [email protected]
Follow us on:Instagram: @frcteam2637
Facebook: @frcteam2637 Twitter: @frcteam2637 Youtube: Team2637 - The Phantom Catz |

|